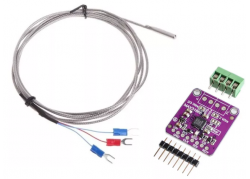
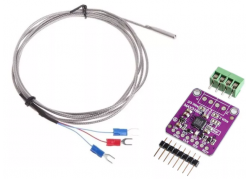
Referencia: MD-09 E
KIT Sensor de temperatura Termocupla PT100 + Modulo de acondicionamiento de señal MAX31865
El módulo MQ-8 es adecuado para la detección de gas hidrógeno, altamente sensible. La sensibilidad se puede ajustar por un potenciómetro incluido en el modulo
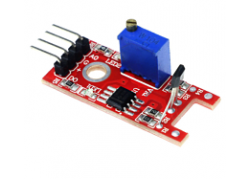
Sensor que detecta campos magnéticos. Basado en un sensor M44, cuenta con un LED indicador de voltaje de alimentación y otro LED indicador de sensado. Entrega una salida digital para ser utilizado como un interruptor, contabilizador o simplemente como señal digital. Entrega una salida analógica que puede usarse como medida de la fuerza del campo magnético.
El Flex Sensor de 114mm es un dispositivo de tipo resistivo cuyo valor de resistencia en ohms varia a medida que se dobla o flexiona la membrana. Cuando la membrana está en estado de reposo, es decir plana totalmente, mostrará un valor resistivo de 10K¿ y su resistencia aumentará a medida que se dobla o flexiona. Flex Sensor de 114mm es fabricado por Spectra Symbol compañía que menciona que estos dispositivos fueron usados en el diseño original del Guante Nintendo Power.
Base plastica para sensor ultrasonido HC-SR04 . Cuenta con un agujero para tornillo de 3mm de diametro en su base para poder sujetarla o otra superficie.
Sensor Muscular Myoware Sin Electrodos
Kit de 37 sensores para poner en practica todos los conocimientos adquiridos en programación y electrónica. Si haces cuentas cada sensor te sale a menos de $3.000 pesos lo cual es muy económico.
Este genial sensor de presencia te permitirá detectar objetos que se encuentren en un rango de 2 a 30 cm. Esta compuesto por dos LED infrarrojos un transmisor y un receptor que operan a una frecuencia definida. Cuando un obstáculo es detectado una Luz verde se enciende y la salida digital del sensor se activa, esta señal la puedes usar para activar un Rele el cual podrá activar un bombillo, un motor, una alarma o cualquier otro elemento electrónico.
El módulo permite medir tensiones de hasta 25V . El sensor es un divisor de tensión con una resistencia de 30kOhm y 7.5Este módulo mide el voltaje basado en un divisor de tensión resistivo. |
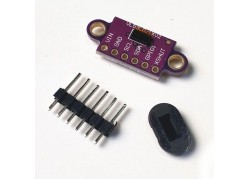
El sensor VL53L0X es parte de la nueva generación de sensores de distancia por tiempo de vuelo (ToF: Time of Flight). Posee un empaque ultra pequeño, ofrece mediciones exactas sin importar la superficie reflectante, con un rango de medición de hasta 2m.
El principio de funcionamiento de los sensores de distancia por tiempo de vuelo es similar al de los sensores ultrasonido: El sensor posee un emisor laser que cada cierto tiempo emite un haz de luz, al encontrarse con un objeto la luz es reflejada, el sensor se encarga de medir el tiempo entre la emisión y la detección de la luz y como la velocidad de la luz es un valor conocido entonces se puede calcular la distancia al objeto con el tiempo de vuelo.