Referencia: MD-05D
Este es un servo robusto con un desplazamiento angular del rotor que va desde 0º hasta 180º. La posición del rotor se controla a través de una señal PWM. La piñonería del servo es metalica
|
|||||||||||||||||
Este es un servo robusto con un desplazamiento angular del rotor que va desde 0º hasta 180º. La posición del rotor se controla a través de una señal PWM. La piñonería del servo es metalica
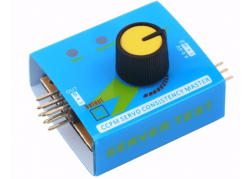
Probador Tester Servo Motor ESC 3 Canales 4.8-6V CCPM
Acople Motor Hub Motor Eje 6mm Aluminio Arduino Robot x 2 unidades
Este set de dos acople de montaje en aluminio permite acoplar ruedas o mecanismos a ejes de motores de 6 mm de diámetro. Incluye dos acoples , 4 prisioneros de 3mm para sujetar el acople al eje del motor y una llave. Cada acople cuenta con 6 agujeros de 3 mm de diámetro para poder sujetar la rueda o mecanismo deseado.
Acople Motor Hub Eje Motor 5 mm Aluminio X 2
Este set de dos acoples universal de aluminio permite el acople de ruedas o mecanismos personalizados a motores que cuenten con un eje de 5 mm de diametro. Incluye dos acoples , 2 prisioneros para sujetar el acople al eje del motor y una llave. Cada acople cuenta con 4 agujeros para poder sujetar la rueda o mecanismo deseado.
Especificaciones:
Tamaño acople: 19 × 5 mm (diametro x grosor)
Diametro del eje: 5 mm
Peso 3.2 gr
Su compra incluye:
Dos acoples , 2 prisioneros para sujetar el acople al eje del motor y una llave
Motor de corriente continua con escobillas y caja reductora con piñonearía metálica, alto par y bajas revoluciones
Este Micromotor a escobillas cuenta con caja reductora de relación 50:1 y soporta una alimentación de hasta 6 V.
Motor DC 3 - 6 VDC 10.000 RPM
Este motor tiene el estándar de medidas Nema 17, es excelente para aplicaciones que requieren una fuerza considerable y exactitud.
Este Micromotor a escobillas cuenta con caja reductora de relación 10:1 y soporta alimentación hasta 6 V.